服务热线
021-60766769
021-60766769

机械手设计完成之后,可以模仿人的手和手臂,完成手和手臂的功能,最后对一些物件,按照固定的程序来完成抓取跟搬运。所以,机械手设计属于机械电子装置范围。在实现空气压缩的基础上,气动搬运机械手可以完成固定的各项工作,其优势非常的明显,用起来非常的轻便,且还有环保节能的优势,动作非常的迅速无故障等,所以在实际工作中得到了非常广泛的应用。
1 气动搬运机械手的设计方案
可以对气动搬运机械手进行以下四个部分的划分:第一个部分是圆柱坐标式;第二个部分是直角坐标式;第三个部分是关节式;第四个部分是球坐标式。划分的依据是具备的运动形式以及具备的组合情形。本次研究着重分析圆柱坐标式气动搬运机械手。分析圆柱坐标式气动搬运机械手设计结构图就可以得到图1(圆柱坐标式气动搬运机械手设计结构示意图)。在分析图 1 的基础上可以得到,结构底座、结构手臂、结构手部结、结构立柱以及结构手腕是气动搬运机械手的主要结构构成部分,该设计可以实现手臂伸缩、手臂升降、手腕回转、手腕回转等自由度的运动。手臂回转与升降运动主要是依靠机座部分的立柱来完成。可以选择使用PLC 编程,在采取PLC 编程的基础上,可以从根本上有效的控制气动搬运机械手中的每一个气缸的工作。分析图1 中的图标得到:1 号为手部结构、2 号为手腕回转气缸结构、3号为手腕结构、4 号为手臂结构、5 号为手臂仲缩气缸结构、6 号为结构立柱图、7 号结构为立柱升降气缸、8 号结构为立柱回转气缸、9 号为底座结构、10 号结构为基体。
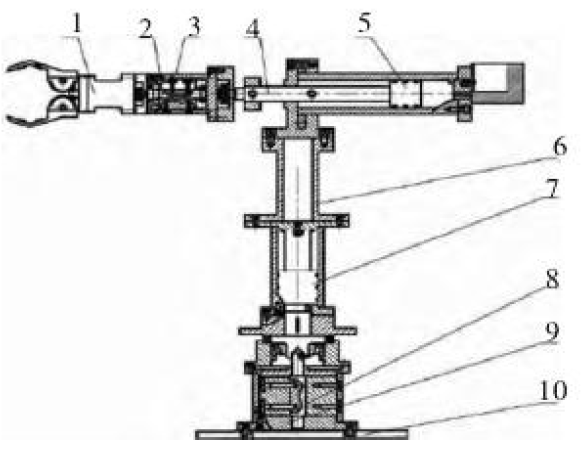
图1 圆柱坐标式气动搬运机械手设计结构示意图
2 气动搬运机械手手部结构设计分析
2.1 夹持类型手部结构工作的原理分析
一般情况下,可以按照标准划分气动搬运机械手手部结构得到以下两种类型:第一个是夹持式手部;第二种是气流负压式手部,本次研究着重介绍夹持式手部,在有效配合手爪与传力机构两个部分的基础上来实现人手功能的有效模仿。倘若气动搬运机械手是齿轮齿条式的一种手部结构的话,那么配合一支点跟两指。圆柱形是大部分气动搬运机械手中工件的形状。所以,在设计气动搬运机械手中的手指部分的过程中,需要按照相关的原则将其设计成V 型形状,配合齿轮齿条两个部分,实现手指之间的开闭操作,并且还需要在活塞杆位置上完成相应的齿条固定的操作,对于手指部分,则需要按照标准完成齿轮的有效固定。在实际工作中,倘若活塞杆向下操作情况存在,那么齿条也需要满足其向下的标准进行运动,其中,右面的齿轮需要配合进行逆时针运动,左面的齿轮需要配合进行顺时针运动,这时候就会张开气动搬运机械手手指,想要实现手指的闭合,就应逆向操作。
2.2 计算气动搬运机械手驱动力和夹紧力
在实际应用气动搬运机械手的过程中,使用字母N来表示工件需要承受的手指施加夹紧力,使用字母F 来表示驱动力。之后完成以下假设:手指V 的角度在w 为120°,工件的重量=5kg,b=120mm,R=24 mm,计算工件所需的夹紧力的公式1。以齿轮齿条传动条件为基础前提,将K1 的拿权系数假设取值大小为 1.5,并且假设工件具备最大的加速度a 为0.3kg/s2。在实际工作中,因为重力的条件下,会产生加速度,这里的加速度为 g= 9.8 kg/s2 的前提下,使用下列数值表示工作情况系数K2:K3= 0.5,K2= 1 + a/g =1.03,之后将已知的数值大小逐个代入各个公式,顺利将工件所需夹紧力计算出来,计算工件所需的夹紧力为公式2。使用以下公式3完成手部完成动作所需的驱动力的计算。在实际工作中,如果取值η=0.94 ,那么得到的气动搬运机械手所需实际驱动力大小使用以下公式4 计算出来。
公式1:N ≥ K 1 K2 K3 G;
公式2:N=K1 K2 K3 G = 1.5×1.03×0.5×5×9.8 ,得到结果为37.9 N;
公式3:F = 2b N / R = 2×120×37.9/24,得到结果为379 N;
公式4:F 实际 = F/η = 379/0.94 , 得到结果为403N。
3 气动搬运机械手手腕结构与气压系统的设计分析
3.1 气动搬运机械手手腕结构设计
在进行气动搬运机械手手腕设计的过程中,需要重视手腕位置的设计。手腕是手部与手臂之间的重要部件。主要的目的是完成手部动作的针对调整,这样一来,就可以从根本上满足模仿人手动作的标准。在一般情况下,气动搬运机械手需要具备非常高的通用性以及实用性,所以,应该从根本上水平放置机械手中的全部工件,所以,在手腕设计的过程中,争取使用回转结构进行设计,同时还需要使用单叶片回转气缸进行辅助,需要从根本上满足机械手最基本动作的标准需要。在进行手腕部位设计的过程中,定片和缸体两者之间的固定连接使用的是螺钉,固定连接动片和回转轴两者使用的是螺钉,同时还可以将手腕位置的气腔分成两个部分,主要的依据是动片,上述这种设计形式主要的目的是实现手腕设计的简便化以及紧凑化。
3.2 气动搬运机械手手腕结构气压系统设计
在实际工作中,应立足于气动搬运机械手动作标准完成大气缸和小气缸的设置,设置1 个大气缸和1 个小气缸即可。大气缸主要的工作就是完成气动搬运机械手中的提升和气动搬运机械手中的下降动作。而小气缸主要的工作就是进行抓取气罐动作,在实际工作中,气动搬运机械手完成动作的时候,会同时伸出大气缸跟小气缸,还会明显提升大气缸的位置,储气罐就会承受来自于小气缸中活塞杆施加给力,并且呈现一个越来越大的趋势,在完成工人储气罐充气操作之后,就会明显的降低大气缸的位置,并且导致储气罐没入水中。在实际工作中,需要工作人员严谨细致的检查储气罐的气密性情况,进而有效的划分合格的产品,剔除那部分不合格的产品,找到合适工作实际的产品,还可以从根本上保证气动搬运机械手设计顺利完成,在上述的基础上就可以促使气动搬运机械手设计的质量得到基础的改善以及提升。
为了验证该项气动搬运机械手设计的可行性以及实效性, 对设计加工制作气动搬运机械手进行相应的实践检验,之后得到以下的结果:气动搬运机械手可以快速的、高精度的模拟人的手部动作, 还具有显著的稳定性。在实际工作中,会存在泄漏的情况,不会对周围环境造成大的影响。且气动搬运机械手具有非常简单的结构设计以及较低的制作成本。在使用PLC 技术的前提下, 可以保证气动搬运机械手动作工作的精准性以及灵活性,提升动作精度,提升通用性。
4 结语
综上所述,气动搬运机械手可以从根本上实现人手动作模拟的构建,主要的基础是气压传动作用的使用。气动搬运机械手动作非常的迅速,且还存在非常良好的适用性,其反应的速度也非常的快等,同时还具有非常高的稳定性以及针对性,所以基本上不会对环境造成严重的影响,并且也能正常的工作。在使用的过程中,气动搬运机械手存在不明显的泄漏情况等,所以,不会增加相应的环境污染程度,并且其所耗费的制作资金成本和设计资金成本还是比较低的,所以对于气动搬运机械手的开发,很多企业还是非常愿意投入资金的。所以,气动搬运机械手可以实现大范围的针对推广以及使用,在我国制造业、货运等多个生产领域中,气动搬运机械手都有使用的情况。在实际操作的过程中,可以选择 PLC 编程的使用来实现气动搬运机械手的针对有效的控制,这样一来,在操作的过程中气动搬运机械手就可以具备非常高的生产可靠性以及标准性,其存在的灵活性非常的显著,并且还会存在非常高的通用性。
上一篇:多功能电梯的电气技能综合设备设计
PRODUCT CATEGORIES

本站部分图片和内容来源于网络,版权归原作者或原公司所有,如果您认为我们侵犯了您的版权请告知我们将立即删除 沪ICP备16023097号-11